The NEC input parsing and phase 1 (geometry) are finished and pass unit tests, with the work that the community has done so far. This is an excellent achievement, but it needs to stand up under the sort of testing and expectations that someone exactly like you, a person reading out of interest in open source wire antenna models, would demand. In other words, it better work for you too!
Before we start phase 2 (electrical analysis), now would be a good time for amateur radio enthusiasts to try cloning the repo, reading the CONTRIBUTING.md markdown document, and making sure that the development tools can be set up as described and that you can run the tests and examples. This needs to happen without unnecessary pain or blockers.
If you are up to giving it a shot and you want to try this out, then it would make a very large difference. Why? Getting things right now pays off big later. Getting things right now means that the development environment and phase 1 results act right for you in the long term. It means that someone that does not have direct or insider knowledge of the design, and doesn’t have anything set up in advance, can directly benefit. If it works for you, and passes tests, then we have met a major milestone.
Try it out and let us know how it works for you. Interested in contributing to phase 2? Welcome aboard!
https://github.com/OpenResearchInstitute/Arcanum
Arcanum: ORI’s New Open Source Antenna Simulation Engine
By Michelle Thompson, W5NYV
There is a title of software that almost every antenna modeler has heard of. NEC-2, the Numerical Electromagnetics Code, was released into the public domain by Lawrence Livermore National Laboratory in 1981. For decades it has been the engine underneath tools like EZNEC, 4NEC2, and xnec2c. It is the mathematical baseline against which antenna designs are validated. NEC-2 is the common language of the modeling community.
NEC-2 is a remarkable piece of work. However, curved antennas (helices, loops, spirals) are poorly modeled by its straight-segment approximation. Closely spaced wires behave badly. Thick conductors don’t act quite right. These are not implementation bugs. They are fundamental properties of the mathematical approach NEC-2 uses.
The solution to these limitations exists. It is called the Conformal Method of Moments with Exact Kernel (CMoM). This approach replaces NEC-2’s straight-segment approximations with curved segments. The NEC-2 kernel is replaced with the full cylindrical surface integral. This means that we get more accurate modeling for exactly the antenna types that matter most to ORI’s work, such as ground station helices, compact loaded dipoles, loops, and arrays.
There is exactly one production software implementation of CMoM with exact kernel in the world. It is proprietary and the current price is $1599 USD per year for the license.
Until now, that has been the end of the story for anyone who needed high-fidelity curved-wire antenna modeling without a commercial license. We decided to do something about that. Arcanum changes things.
What Arcanum Is
Arcanum is ORI’s new open source CMoM antenna simulation engine. It is, to the best of our knowledge, the first open source implementation of the Conformal Method of Moments with Exact Kernel.
The name is intentional. An arcanum is hidden or secret knowledge. The mathematical techniques underlying CMoM have been in the academic literature for decades. Champagne, Williams, and Wilton described the curved-segment approach in 1992. This reference is listed in the Arcanum bibliography. We assemble these approaches into an accessible, open, community-owned tool. That is what we are building.
Arcanum is written in Rust with Python bindings, which means it runs fast where it needs to (the numerical core) and it stays accessible where it counts (notebooks, scripts, integration with existing ORI tooling). It reads standard NEC file format, so every antenna model that has been ever built in EZNEC or 4NEC2 works immediately.
Where We Are Right Now
We have completed the design and documentation phase. Sixteen design documents covering every aspect of the engine, from geometry parsing, matrix fill, linear system solve, to post-processing, are written, reviewed, and committed to the repository. Every mathematical derivation is documented. Every test case is specified with expected numerical values before a single line of production code is written.
This is intentional. We are following a design-first process that many of us at ORI learned in industry: design, document, code, test. The heavy intellectual work, figuring out what to build and why, is done. This brings us to implementation, which is where our community comes in.
The repository includes reference antenna decks for immediate use. There is a classic half-wave dipole, a 3-element Yagi-Uda, an axial-mode helix over ground, and ORI’s own Dumbbell compact HF antenna. https://github.com/OpenResearchInstitute/dumbbell
The Dumbbell deck in particular reflects real ORI work. It was designed, built, and field-tested by the Washington DC team and then the San Diego team, and its measured SWR data over multiple builds gives us real-world validation ground truth.
Why This Matters for ORI
Arcanum is a contribution to the broader RF engineering community. Amateur radio operators, academics, and engineers who have been working around NEC-2’s limitations for decades will have a free, open, better alternative. Given how much of ORI’s own work builds on the tools and knowledge the amateur radio community has developed over generations, giving something substantial back is the right thing to do.
Get Involved
The Arcanum repository is live at ORI’s GitHub. GitHub Discussions and Issues are open. Questions about the design documents, proposed changes, and implementation planning are welcome. The #antenna-design channel on ORI Slack is active.
If you model antennas, write Rust, work in Python numerical computing, or just want to understand how antenna simulation actually works from the mathematics up, there is a place for you in this project.
Arcanum repository: https://github.com/openresearchinstitute/arcanum
ORI getting started: https://openresearch.institute/getting-started
#antenna-design on ORI Slack
Inner Circle Newsletter March 2026
All the articles from the March 2026 Inner Circle Newsletter in one place.
The Case of the Missing Transmit Power
How a 4-bit Misalignment Stole 24 dB from the Opulent Voice Modem
The Opulent Voice modem for the LibreSDR graduated from the lab to the field in late March 2026. Instead of coaxial cables connecting transmitter to receiver, and receiver to transmitter, we now connected our brave little radios to filters and outdoor antennas.
And, nothing was received. The signal levels appeared to be very low. Even moving the antennas right next to each other resulted in only a few scattered frames demodulated and decoded.
Obviously, we needed an amplifier. Fortunately, we had plenty in stock from collaborating with University of Puerto Rico’s RockSatX team. They used an earlier version of Opulent Voice on their sounding rocket.
From the original listing at https://www.ebay.com/itm/363233702995
—————————————————
Microwave RF Power Amplifier Board SBB5089+SHF0589 40MHz-1.2GHz Gain 25DB 10PCS
Specifications:
– Input voltage: 10~30V DC
– Input power: about 5W
– Working frequency: 40MHz~1.2GHz (0.04~1.2GHz)
– Gain: about 25dB (may be higher)
– Power: 2W (may be higher)
Attention:
We measured 80.7% ultra-high efficiency in tests, and the official chip manual also mentioned that there is more than 50% efficiency at P1dB. Overall, this SBB5089+SHF0589 is better than SBB5089+SHF0289.
—————————————————
On 24 March 2026, we selected one of the amplifiers at random in order to characterize it in ORI’s Remote Labs. We connected the input of the amplifier to the output of the DSG821A signal generator. The signal generator was set to 431 MHz, which was the frequency we wanted to use. We connected the output of the amplifier through a 6 dB attenuator to the Rigol RSA5065N Spectrum Analyzer. We fitted a JST-HX power cable to the power connector of the amplifier. We provided 12 volts of power from the DP832 lab power supply.
The amplifier made 27 dB of gain from -100 dBm input to about -3 dBm input, made 20 dB at 0 dBm input, and worked pretty well up to 9 dBm input.
The next test was to remove the signal generator and connect a LibreSDR running Opulent Voice. Instead of a carrier wave from the signal generator we’d be sending an 81 kHz wide minimum shift key (MSK) signal from a real modem through the amplifier. We were intending to repeat the measurements we’d made with the signal generator. However, we noticed something very interesting. The signal level from the LibreSDR was expected to be about 0 dBm, which would provide enough drive to the amplifier to create enough gain to help our over-the-air tests succeed. However, when the LibreSDR, running Locutus and Dialogus, was commanded to transmit with PTT and audio frames from Interlocutor, the peak of the main lobe of the MSK signal was at 1 microwatt. If this was the true power output of the LibreSDR, then no wonder the over-the-air tests had failed.
The transmit power hardware attenuation setting was confirmed to be at 0 dB. This is set through an Industrial Input and Output (IIO) library attribute call, was correctly reported, and we saw that changing the attribute caused the signal to increase or decrease by the exact amount of gain. So, it wasn’t a configuration error. As far as the hardware was concerned, it was transmitting at 0 dBm.
The other possibility was that the I and Q signals were not being generated for transmit at full scale. If we weren’t filling up the registers correctly, then maybe we were accidentally dividing our signal down before it got to the antenna. Investigation turned to the Hardware Descriptive Language (HDL) files.
The Opulent Voice VHDL language modem, called Locutus, runs inside the LibreSDR FPGA. Data frames arrive via direct memory access, pass through the Opulent Voice frame encoder, are convolutionally encoded (K=7, rate 1/2), go through a byte-to-bit deserializer, and the resulting bits are sent to the MSK modulator. The modulator produces the I and Q samples that drive the AD9363 digital to analog converter (DAC). Software in the general purpose processor of the LibreSDR configures the IIO context and controls PTT.
The direct memory access transfers protocol data frames into the LibreSDR, and not IQ samples. So, the classic PlutoSDR bug of 12-bit samples being miscounted in a 16-bit word did not apply here. The modulator itself generates all I and Q waveforms. The frequencies are set by Dialogus at startup.
The Integrated Logic Analyzer (ILA) in the bitstream already had probes on two very important signals, tx_i_sync and tx_q_sync. These signals were measured right at the point where the samples enter the AD9361 core. A January 2026 ILA capture told the story clearly. The waveform showed clean MSK signals. No corruption, no skips, and with the exact right relationship to each other. At the time, this was a big milestone and part of the process of troubleshooting the porting of the HDL code from the PlutoSDR to the LibreSDR. But we’d overlooked something critical. The bug was right there in an otherwise perfect image.
The peak values of the I and Q waveforms were only plus and minus 1100 or so, in a 16-bit signed word. At first glance, a value of 1100 in a 16-bit word might not raise any red flags. The alarm bells ring when you know how the axi_ad9361 core actually reads those 16 bits.
There are two different conventions on the same bus. The axi_ad9361 core uses 16-bit data buses internally. However, the AD9361 and AD9363 (the chips used in these software-defined radios) have only 12-bit digital to analog converters. The documented convention, confirmed by a tour through Analog Devices Engineer Zone forum, is as follows.
RX (ADC Output) is 12-bit value in [11:0], sign extended to [15:12]
TX (DAC Output) is 12-bit value expected in [15:4], which is the top 12 bits
In plain English, RX gives you the data right-justified. TX expects it left-justified. These are opposite conventions on the same 16-bit bus, and the apply whether the interface is CMOS (PlutoSDR) or LVDS (LibreSDR).
Our code, from msk_modulator.vhd, in the carrier_mod_proc section looks like this.
tx_samples_I <= std_logic_vector(resize(s1s + s2s, SAMPLE_W));
tx_samples_Q <= std_logic_vector(resize(s1c + s2c, SAMPLE_W));
s1s and s2s are each signed 12-bit values from the numerically controlled oscillator (NCO). The lookup table fills using the command
ROUND(SIN(theta) * 1024.0)which gives a peak value of plus or minus 1024. VHDL addition of two such values produces a 12-bit result that ranges from -2048 to +2048. So far so good. The resize call then sign-extends that 13-bit result into 16 bits. This is a right-justified 16-bit word, which is the opposite of what the Analog Devices core expects.
The full chain of what happens to the signal amplitude can be calculated.
The lookup table output is [11:0] signed and is a 12-bit sinusoid.
s1s + s2s is [12:0] signed and is a 13-bit sum.
Resize(…, 16) [15:13] sign extension with [12:0] as the data. This is right-justified.
Analog Devices chip reads transmit values as [15:4], sending the top 12 bits to the DAC.
Analog Devices reads [15:4], we drive [12:0], and this is a divide by 16 to the amplitude.
What’s the damage? -24 dB.
Why did this work in the PlutoSDR? Well, it didn’t. It did not produce full power, either. The same modulator code drove the Pluto variant of Opulent Voice. The -24 dB bug was there too. Why did we not notice it? We never graduated to over-the-air tests with the PlutoSDR. All of the tests transmissions were in the lab and were either conducted through coaxial cables or done with Vivaldi lab antennas right next to each other on the bench. With conducted tests, everything worked perfectly.
For ORI’s LibreSDR work, we were now in the field. We wanted to characterize the modem output before adding an amplifier. That scrutiny revealed the long-lived bug in the HDL.
Matthew Wishek NB0X implemented a fix on the tx_sample_scale branch of the published repository, with changes to two submodules, the NCO and the msk_modulator. No changes to the block design TCL or to msk_top.vhd were required.
In the NCO (sin_cos_lut.vhd), a new constant was introduced: CONSTANT FULL_SCALE : INTEGER := 2**(SINUSOID_W-1) -1. And, the lookup table fill function was changed from the hardcoded 1024.0 to * real(FULL_SCALE). With SINUSOID_W = 12, this gives FULL_SCALE = 2047, filling the entire signed 12-bit range. The fix is fully generic. It works for any value of SINUSOID_W.
-- Before:
tmp := ROUND(SIN(theta) * 1024.0);
-- After:
CONSTANT FULL_SCALE : INTEGER := 2**(SINUSOID_W-1) - 1;
tmp := ROUND(SIN(theta) * real(FULL_SCALE));In the modulator (msk_modulator.vhd), a new 3-bit input port tx_shift : IN std_logic_vector(2 DOWNTO 0) was added. The IQ output assignment was changed from a plain resize() to a shift_left() whose amount is driven by tx_shift at runtime.
-- Before:
tx_samples_I <= std_logic_vector(resize(s1s + s2s, SAMPLE_W));
-- After:
tx_samples_I <= std_logic_vector(
shift_left(resize(s1s + s2s, SAMPLE_W),
to_integer(unsigned(tx_shift))));The full 12-bit scale was achieved. With the sum now peaking at plus or minus 4094, left-shifting by 3 puts the signal in the correct place, which is [15:3]. The Analog Devices core reads [15:4], which is the full DAC scale. Making tx_shift a configurable port rather than a hardcoded constant is an elegant touch. Dialogus sets it through the register map at runtime, with no bitstream rebuild needed.
With the tx_sample_scale fix integrated and a new bitstream loaded, the Opulent Voice modem then achieved its first successful over the air transmission. This was from one building to another, with the full signal chain, from a LibreSDR to another LibreSDR. Voice traffic and text messages were received, with excellent audio quality. The ~30 dB shortfall that had been quietly sitting in the hardware since the original modulator was gone.
Lessons Learned
RX and TX use opposite justify directions in axi_ad9361. This is documented, but really only in a so-called Verified Answer on Analog Devices Engineer Zone forum. It’s not prominently documented in the IP wiki. The wiki describes the 16-bit data base and mentions that the IP “always works in 16 bits”, but does not call out the left/right justification asymmetry in a way that is easy to find. If you are writing custom HDL that drives DACs, then you should read the forum thread at https://ez.analog.com/fpga/f/q-a/112155/axi_ad9361-data-format
ILA probes are worth their cost. The screenshot from the ILA capture back in January 2026 told us the answer, if we had known what the question was. Running ILA and keeping the results pays off because you can go back and look at signals that may not be accessible otherwise. Wire up ILA early and often and be curious about your signals. Go for a tour. Explore your design and the design of any infrastructure that you are working with.
-24 dB is a recognizable signature. In fact, any multiple of -6 dB is significant. Each bit of DAC resolution is 6 dB, so if you’re missing something like 24 dB, then an inadvertent four-bit shift might be the culprit.
Fix things at the right layer. The initial discussions included assumptions such as “the fix should live in the block design TCL file” or maybe in msk_top. Matthew chose to fix it inside the modulator and NCO submodules. This is the better choice. It makes the modules self-consistent, removes the need for platform-specific fancy workarounds or settings, and ensures that any future target automatically benefits. When a submodule’s output format is wrong, fix the submodule rather than papering over it at the integration layer.
Acknowledgements
The modulator and NCO were written by Matthew Wishek NB0X, whose clean modular architecture made the bug straightforward to trace, and whose tx_sample_scale branch fix resolved it elegantly at the right layer. Thanks to the ADI FPGA team (Laszlo) for the EngineerZone Verified Answer that became our primary citation. Thanks to Paul KB5MU and Michelle W5NYV for working through this signal chain, characterizing the amplifier, and methodically testing the new firmware.
ADI EngineerZone — AXI_AD9361 Data Format (Verified Answer): ez.analog.com/fpga/f/q-a/112155/axi_ad9361-data-format
ADI Wiki with AXI_AD9361 IP documentation: wiki.analog.com/resources/fpga/docs/axi_ad9361
ORI pluto_msk repository (tx_sample_scale branch): github.com/OpenResearchInstitute/pluto_msk
ORI msk_modulator repository: github.com/OpenResearchInstitute/msk_modulator
ORI nco repository (sin_cos_lut fix): github.com/OpenResearchInstitute/nco
Monument Peak Tower Collapse
February 2026 Storm Takes Down Communications Infrastructure on Mount Laguna, CA, USA
by Sudoku Ham for ORI
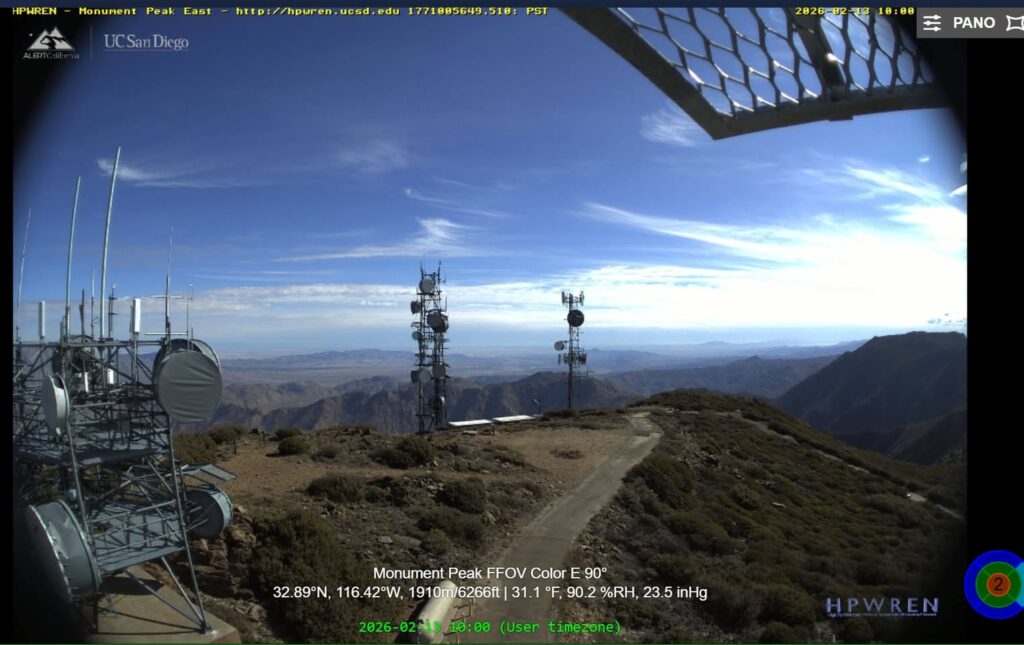
At exactly 10:00 AM on Wednesday, February 18, 2026, a communications tower on Monument Peak in the Laguna Mountains was blown over during a powerful wind event, captured in real time by a nearby wildfire camera system. The tower, owned by American Tower Corporation (ATC), had been carrying an AT&T cellular site and several microwave hops. According to sources familiar with the site, that was the only functional equipment on the structure at the time of its collapse.
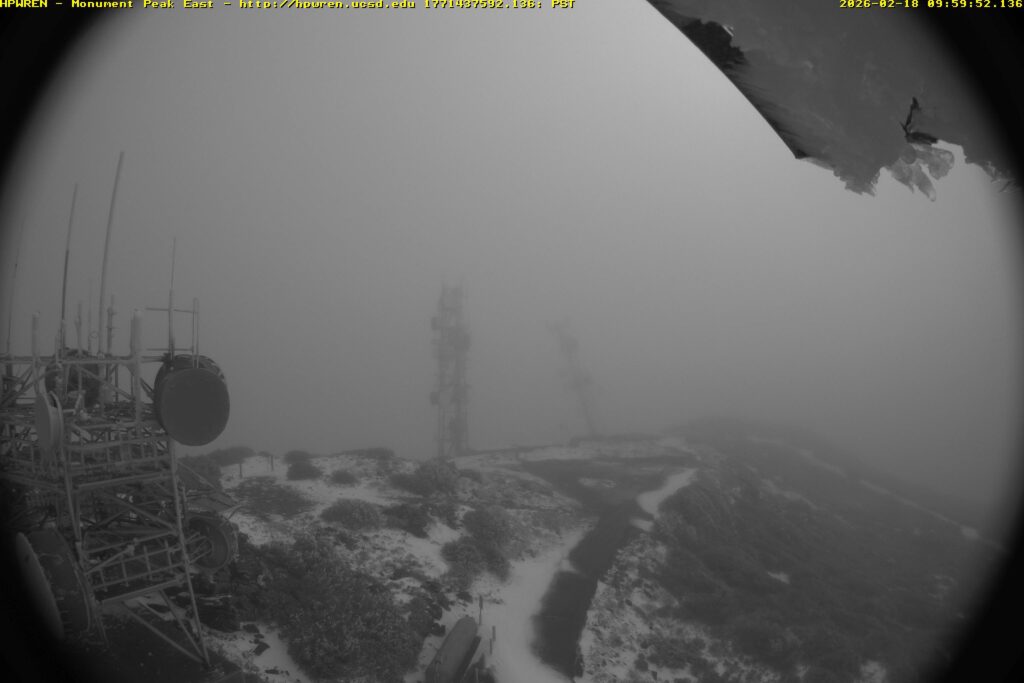
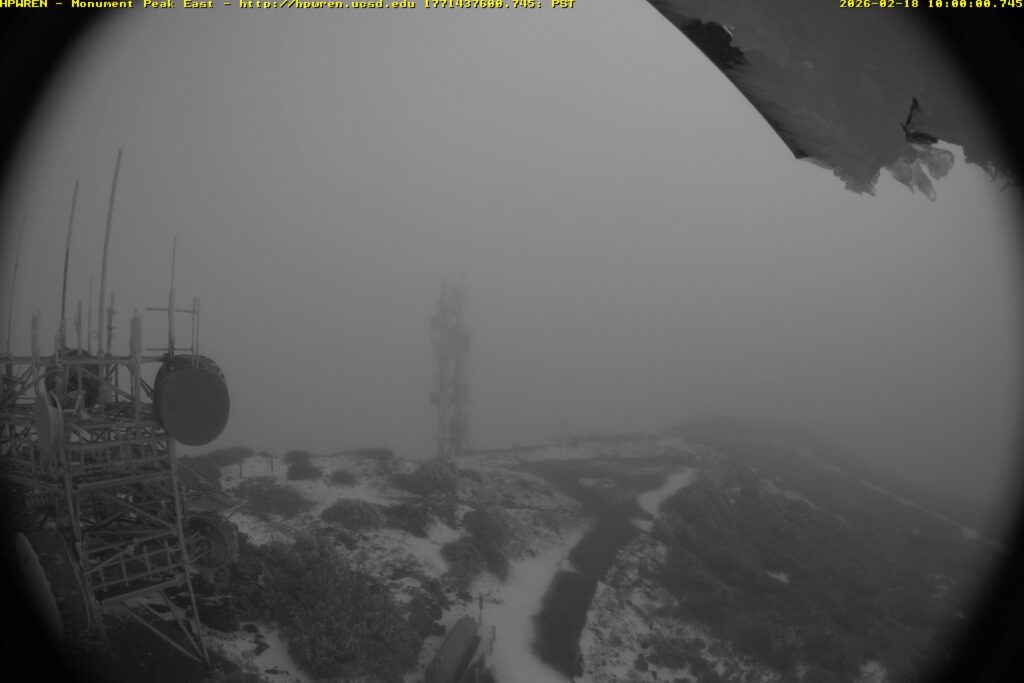
The failure was documented by the HPWREN (High Performance Wireless Research and Education Network) camera system. This system is operated by UC San Diego’s San Diego Supercomputer Center. Video assembled from the east-facing fixed-field-of-view camera shows a major wind event immediately preceding the collapse, with the tower going over at 10:00 AM. A before-and-after comparison of HPWREN still frames, one from February 13 showing the tower standing, another from later on February 18 showing it gone, confirms the loss. Snow visible in the post-collapse image and on the wreckage is consistent with the heavy winter weather that preceded the failure.

Hans-Werner Braun, Research Scientist Emeritus at UCSD, provided additional HPWREN images. Hans-Werner is deeply involved with HPWREN, having served as Principal Investigator. “These are from the 10 second data that we additionally collect for a small subset of the cameras.”


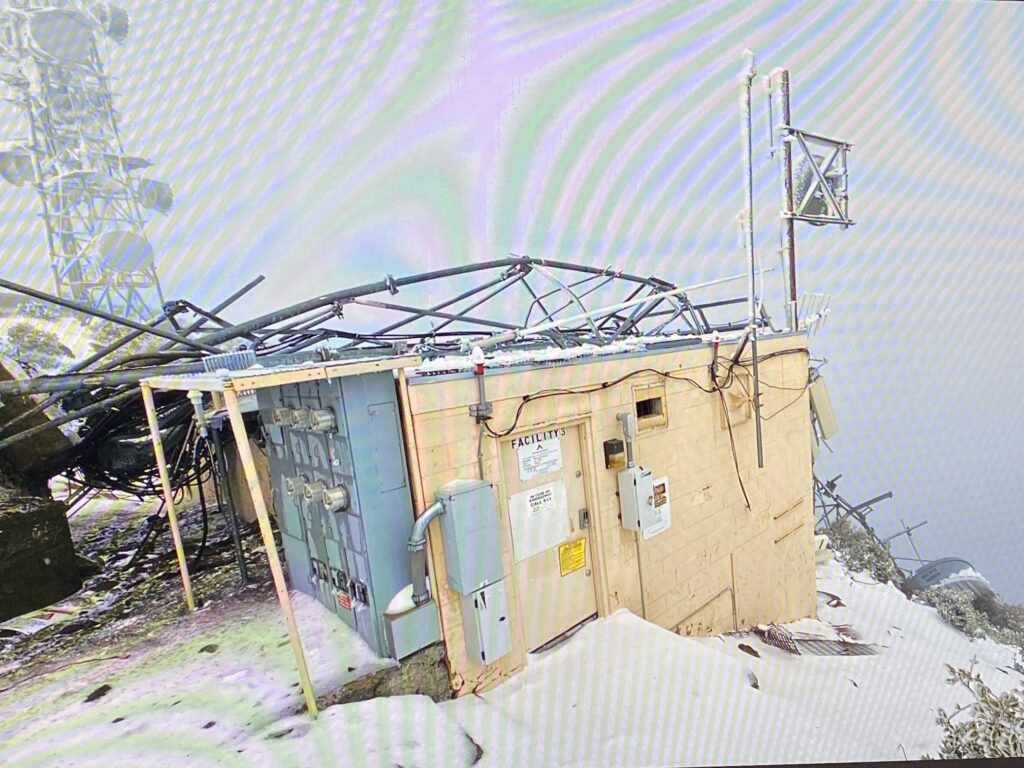
Damage photos obtained from CORA (Cactus Open Repeater Association) members, originally shared by Chris Baldwin, show the aftermath in stark detail. A lattice tower structure torn from its concrete foundation, the base ripped out of the ground with rebar exposed, and the wreckage draped across an equipment shelter labeled “FACILITY 3.” The concrete pier appears to have failed catastrophically, with the entire foundation block uprooted rather than the tower buckling above the base. The combination of snow and ice loading on the structure, high sustained winds, and the age of the tower and presumed lack of recent maintenance all contributed to the failure.
Steve Hansen, W6QX, first drew attention to the HPWREN imagery showing the tower’s disappearance.

The Storm
The collapse occurred during a series of storms that struck San Diego County over the span of four days. The first wave hit Monday, February 16, bringing heavy rain and winds gusting to 60 mph on Mount Laguna. A second, more intense wave arrived overnight Tuesday into Wednesday, the morning the tower fell. That wave produced winds of 80 mph at El Cajon Mountain, measured at 3:30 AM. Wind was measured at 76 mph at Birch Hill in the San Diego County mountains, and at 52 mph in the desert. The National Weather Service reported snow accumulations approaching a foot on Mount Laguna, with additional snow bands continuing through February 19. A third and final round brought further showers and gusty winds on Thursday the 19th before conditions improved Friday.
The HPWREN camera overlay on the February 18 image recorded conditions at Monument Peak of 31.1°F, 90.2% relative humidity, and 23.6 inHg barometric pressure. It was cold, and the front had clearly moved through.
What Was on the Tower?
Monument Peak (32.89°N, 116.42°W, at 6,271 feet) sits at the eastern edge of the Laguna Mountain Recreation Area within the Cleveland National Forest. It is one of the most significant multi-use communications sites in eastern San Diego County, with a coverage footprint extending from the Salton Sea south to the Mexican border and west across the county.
The ATC tower that collapsed was one of multiple structures at the site. The site hosts a diverse set of users and systems. Services known to operate from Monument Peak include the following.
Amateur Radio: The East County Repeater Association (ECRA) operates several repeaters from the Monument Peak site, including 147.240 MHz (+ offset, PL 107.2 Hz. K6KTA, which is a joint effort with CORA that participates in the CalZona Link), 446.750 MHz (- offset, PL 107.2 Hz), and 449.180 MHz (- offset, PL 88.5 Hz). These repeaters appear to have been on a different structure than the one that fell. Operators are encouraged to confirm current status on the air.
HPWREN/ALERT: This system from UC San Diego operates fixed-field-of-view and pan-tilt-zoom wildfire detection cameras, microwave backbone links, and a weather sensor suite from the site. Monument Peak is a backbone node in the HPWREN network and has been since the project transitioned from nearby Stephenson Peak. The HPWREN cameras that documented this collapse were themselves mounted on a separate structure and survived.
NASA Space Geodesy: The Monument Peak compound hosts NASA’s MOBLAS-4 Satellite Laser Ranging (SLR) system, which has operated from this location since 1981, along with a GNSS antenna and an EarthScope seismic station.
Commercial and Public Safety: There are multiple microwave relay dishes and panel antennas visible in the HPWREN imagery on surviving structures. Historical records show San Diego County Sheriff’s Office VHF low-band repeater infrastructure at the site dating to the 1960s.
According to sources familiar with the site, the only functional equipment on the collapsed ATC tower was the AT&T cell site and its microwave backhaul links. The full inventory of what had previously been on the structure versus what was still active is not entirely clear, but the tower appears to have been underutilized at the time of its failure.
What We Know and What We Don’t
The video from the HPWREN cameras answers the biggest question. When did it fall? At 10:00 AM on February 18, during the second and most intense storm wave. Sources who have viewed the time-lapse describe it as showing a clear wind event immediately before the collapse. As is often the case with periodic camera captures of structural failures, the tower is there one frame and gone the next.
What was the failure mode? The damage photos show the concrete foundation pier uprooted from the ground rather than the tower folding at a structural joint. Whether ice loading, sustained wind, a gust event, or a combination caused the failure is unknown. No formal engineering assessment has been publicly released, but commenters seem surprised about the relatively small amount of concrete that was pulled up.
What services are currently offline? The ECRA repeaters and HPWREN systems appear to have survived on other structures. The primary loss appears to be AT&T cellular coverage and microwave backhaul from this site. Operators in the coverage area, particularly in eastern San Diego County and the Imperial Valley, may have noticed cellular outages.
What Happens Next
The central question is whether American Tower Corporation will rebuild. As one source familiar with the site put it (Chris KF6AJM), the only functional thing on the tower was the AT&T cell site with a few microwave hops. Whether that single-tenant revenue justifies the cost of constructing a new tower at a remote mountaintop location in a national forest, with all the permitting, environmental review, and logistics that entails, remains to be seen. It is not clear if that is profitable enough for ATC to put money into the site.
Mountaintop tower sites in places like the Cleveland National Forest are expensive to build and maintain. Access roads can be difficult in winter. Construction requires Forest Service approval. And the economics of a single-carrier site are thin compared to a multi-tenant tower in an urban area. There has been a long-term trend away from using large mountaintop towers, with capacity replaced by fiber backhaul and fixed wireless broadband. The reason for this is that wide coverage is now less valuable than capacity per user. Higher data rates per commercial cellular user cannot be delivered by one large site covering a large land mass as easily and cheaply as can be delivered with more sites all closer to the ground.
On the other hand, Monument Peak provides cellular coverage to areas of eastern San Diego County and the Imperial Valley that are otherwise difficult to serve. The microwave hops that ran through this tower may also have been part of a backhaul chain serving other sites. The downstream effects of this loss on AT&T’s network in the region are not yet clear.
Monument Peak has weathered storms before. HPWREN documented significant wind damage at their Big Black Mountain relay site in January 2018 during a Santa Ana event with 80-90 mph winds, and the HPWREN team rebuilt that site with an improved design to better withstand future weather. A similar assessment and improved rebuild process will likely be needed here for the commercial tower that fell if the economics support it.
For a site that serves as a critical node in the region’s wildfire detection network, amateur radio infrastructure, scientific instrumentation, and commercial communications, the loss of even one tower could have cascading effects. The coming weeks will tell us more about the extent of the damage, any additional as-yet undiscovered damage on other towers, and the timeline for restoration.
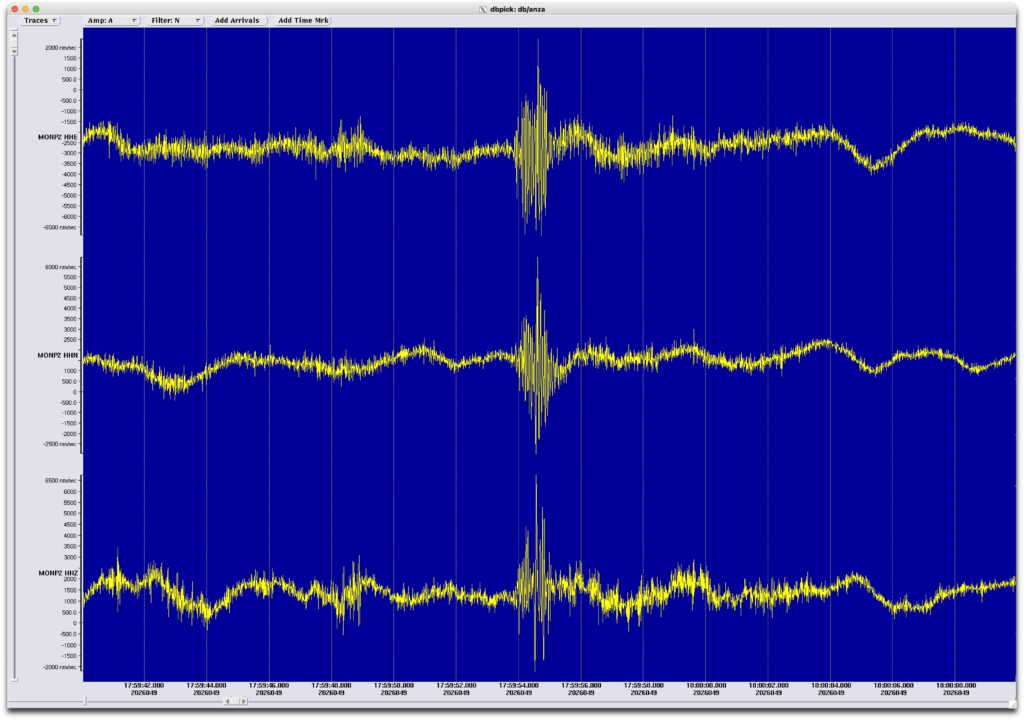
Dr. Frank Vernon, primary investigator for the HPWREN program, confirmed that no HPWREN assets were on the tower that fell. He added via email that UCSD has a seismic station 250 meters from the tower. “Looking at the seismic data”, Dr. Vernon explained, “it looks like we can see the tower hitting the ground.”
Timeline:
09:59:51.5 Color mobo shows tower tilting (see photo from Dr. Werner-Braun above)
09:59:52.1 Monochrome mobo shows tower tilting more (see photo from Dr. Werner-Braun above)
09:59:54 Seismic signal observed
James Davidson (UCSD) provided an additional damage photo, pointing out that “there isn’t much concrete below ‘grade’, and you can also see the rods sticking out, with a big chunk of rock pulled up too.”

If you have additional information about this event, particularly regarding which services are affected or the path forward for restoration, please contact us at ORI. Newsletter signup here: https://www.openresearch.institute/newsletter-subscription/
Photo Credits and Sources
Damage photos: Chris Baldwin, via CORA (Cactus Open Repeater Association) members, and James Davidson (UCSD).
HPWREN before/after camera images: HPWREN Monument Peak FFOV Color E 90° camera, UC San Diego / San Diego Supercomputer Center. HPWREN is funded by the National Science Foundation (Grant Numbers 0087344, 0426879, and 0944131). http://hpwren.ucsd.edu. HPWREN 10-second camera subset imagery from Hans-Werner Braun.
Tip on HPWREN imagery: Steve Hansen, W6QX.
Seismic chart: Dr. Frank Vernon.
Storm data: National Weather Service San Diego (NWS SGX); NBC 7 San Diego; San Diego Union-Tribune; KOGO Newsradio 600; ABC 10News San Diego.
Site information: American Tower Corporation; MRA-Raycom (mra-raycom.com); NASA Space Geodesy Project (space-geodesy.nasa.gov); ECRA (ecra-sd.com); RepeaterBook; N6ACE repeater listings.
Lunar Descent, the BSides San Diego 2026 RF Village Capture the Flag (CTF) from ORI
A capture-the-flag challenge based on a real signal processing problem in a radar altimeter!
https://github.com/OpenResearchInstitute/lunar-descent-ctf
Indian Space Research Organization (ISRO) designed a Ka band radar altimeter (KaRA) that guided Chandrayaan-3 to a soft lunar landing on 23 August 2023. The Radar Altimeter Processor (RAP) computes altitude and velocity from FMCW chirp signals, running on a single Xilinx Virtex-5 FPGA. This CTF uses a Python model of that system, faithful to the published paper in the Aeronautics and Electronic Systems Journal, where the altimeter feeds a landing autopilot. In our CTF, the altimeter works perfectly. The autopilot keeps crashing. Why? (solution in next newsletter!)
What did the participants see? A python script that could be installed on their computer and then run.
pip install numpy matplotlib
python lunar_descent_ctf.py --help # See all options
python lunar_descent_ctf.py # Run the mission, watch it crash
python lunar_descent_ctf.py --modes # See the sweep mode table
python lunar_descent_ctf.py --test -p all # Test all three profiles
python lunar_descent_ctf.py --score # Score your fix and earn flagsRules
Edit ONLY the `MeasurementQualifier` class (clearly marked in the source)
Don’t change the RAP, signal generation, autopilot, or scoring
The qualifier decides what the autopilot sees — fix it there
Submit flags at the RF Village table
Three Flags
None of the flags are “free”. The buggy code scores 0 / 1000 points out of the box.
| Flag | Points | Challenge |
| RECON | 100 | Explain the bug to RF Village staff. No hash on screen. |
| FIRST LIGHT | 500 | Land all three profiles without crashing. |
| NO GAPS | 400 | Zero qualifier rejections on all three profiles. |
Total: 1000 points
The Scenario
The radar altimeter was tested on helicopters and aircraft at altitudes above 50 meters. It worked flawlessly. Field test performance met all mission specifications.
The altimeter is now integrated with a landing autopilot that uses both altitude and velocity measurements for thrust control during final approach. In simulation, the autopilot crashes the lander every time below 15 meters altitude. The altitude readings are fine. Sub-meter accuracy all the way to touchdown. Something else is killing the lander.
You need to find out what’s going wrong and fix the measurement qualification logic so the autopilot can land safely.
Difficulty Curve
0 points: Running the code unmodified. The default run shows OK status all the way down until the final approach, then CRASH.
100 points: Explaining the problem to staff.
600 points: Fixing the `MeasurementQualifier` so it can land.
1000 points: Eliminating all qualifier rejections.
Validating Flag 1 (RECON)
No hash is printed on screen for Flag 1. Staff issue the flag manually.
Timing
The CTF ran all day alongside the workshop modules and talks. It’s self-paced and doesn’t require staff attention except for Flag 1 validation and prize distribution.
Test Profiles
| Profile | Character | What It Tests |
| standard | Chandrayaan-3-like smooth descent, 10 km → 3 m, with altitude excursion at 20 m (thruster anomaly or drifting over crater) | Landing |
| aggressive | Fast exponential braking, 10 km → 3 m in 400 s | Rapid mode transitions at hight altitude + Landing |
| stepwise | Hover at guard band boundaries (9851/4795/2334/553/131/31/5 m), drop between them | Mode transitions + Low Hover |
The Physics
The RAP uses FMCW radar. Up-chirp and down-chirp signals produce beat frequencies:
f_up = fb − fd (up-chirp)
f_dn = fb + fd (down-chirp)Altitude comes from the sum: R = M × (f_up_index + f_dn_index).
Velocity comes from the difference: fd = (f_dn_index − f_up_index) × freq_res / 2.
The FFT is always 8192 points, but the number of real signal samples depends on the sweep time:
Mode 12 (high altitude): 8192 samples, full FFT
Mode 0 (3 m altitude): 14 samples, 99.8% zero-padding
Connection to Real Engineering
The problem is pedagogically framed but the pattern is real. Sensor qualification, knowing when to trust a measurement and when to reject it, is important.
Radar and sonar tracking systems (Doppler reliability vs integration time)
GPS/INS integration (knowing when satellite geometry is too poor to trust)
Medical imaging (SNR-dependent confidence in measurements)
Autonomous vehicle sensor fusion (camera vs lidar vs radar confidence)
The paper mentions “three sample qualification logics to generate the final altitude” without detailing them. What are those logics? Will some of those qualification logics help solve this CTF?
Source
Based on: Sharma et al., “FPGA Implementation of a Hardware-Optimized Autonomous Real-Time Radar Altimeter Processor for Interplanetary Landing Missions,” IEEE A&E Systems Magazine, Vol. 41, No. 1, January 2026. DOI: 10.1109/MAES.2025.3595090
BSides San Diego 2026 RF Village Demonstrations
This is what development looks like!
Open Research Institute organized and executed the RF Village at BSides San Diego on 4 April 2026. This highly anticipated sold-out annual event has a focus on cybersecurity and DIY problem solving. Held at Montezuma Hall at San Diego State University, the one-day event had multiple speaking tracks, at least three Capture the Flag contests (CTFs), an electronic hackable badge, a variety of food and drink available throughout the day, extensive volunteer support, relevant and timely workshops, an After Hours party with more food and drink at Aztec Lanes bowling alley, and a vibrant Village Square that combined Villages and Vendors.
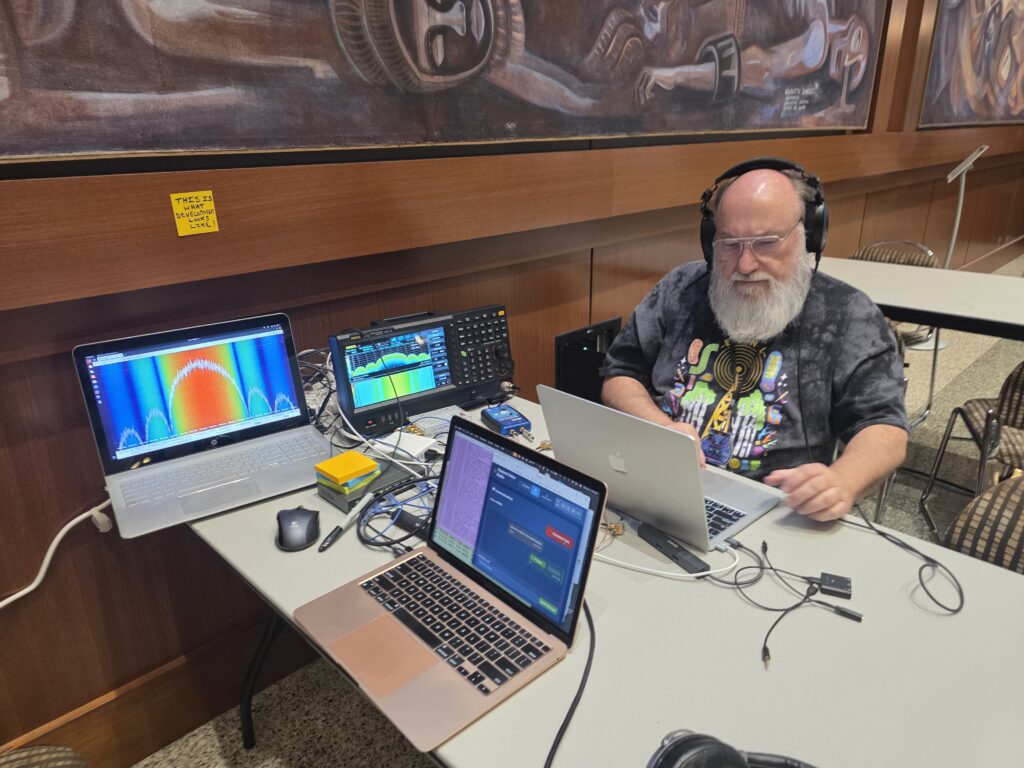
ORI served as the organizer for RF Village, bringing four staff members and multiple exhibits. We debuted our Lunar Lander CTF, announced the W6ORI amateur radio club, and gave away a large box of Amateur Satellite handbooks. We had RFBitBanger kits available for donation (5 were sold), hosted a live Meshcore node, and exhibited a real live FPGA development station with lab equipment for Opulent Voice. Our poster session included Authentication and Authorization and the technical side of RFBitBanger. Thank you to BSides San Diego for the excellent support, with rotating village volunteer staffers, volunteer green room, excellent communications before during and after the event, and genuine care for positive participant experience. Organizations like this make demonstrating open source digital radio work a real joy instead of a daunting chore.
Demonstrations give you deadlines, documentations, and get things “done”. The BSides Opulent Voice demonstration revealed some immediate problems with the 24 dB transmitter fix. The signal was clearly being transmitted at sufficient power, but the symbol and frame lock were not happening. We were seeing “garbage” frames where we were expecting to see actual live data.
Since the over-the-air voice call had worked so well just a few days prior, what was going on? The demonstration was still very successful, as plenty could be shown to the steady stream of people at the RF Village. As the day progressed, more information was gathered. It was very clear we’d have to go back to the lab to figure out how a badly needed transmitter fix had broken the receiver. Why was it working over the air, and not in RF loopback on the bench? First, we went back to the VHDL-only test bench. This sends 10 frames into the transmitter, routes the transmit I and Q streams right back to the receiver, and then demodulates, decodes, and displays the frames. The data in should match the data out. And, frames were coming out, but they were completely scrambled! Something had gone wrong in the RF loopback.
The difference between simulations and real life is usually a lot, and Opulent Voice is no different. A real hardware RF loopback has the radio chip in the loop. The VHDL test bench has only the FPGA contents. We don’t have analog to digital converters (ADCs), digital to analog converters (DACs), or anything else that is in the radio chip. Since the transmitter fix had a lot to do with how the transmitter DAC dealt with the data, it seemed reasonable to assume that the transmitter fix had upset the receiver.
The missing gain was in the transmitter, but the fix applied some math changes to both the transmiter and the receiver, and investigating this took up part of the next day back in the lab. WIth two minor changes, the test bench started working flawlessly again. A new version of the firmware was created, and… it didn’t work in hardware at all! Symbol lock and frame lock were totally non-functional. The plot had certainly thickened.
This is one of the many reasons why demonstrations are so valuable. We find things that we might not go looking for, and it forces us to regularly show things working end-to-end. Work continues this week in the lab to separate the transmitter fix from inadvetently affecting the receiver, and bring us back to working perfectly over the air as well as in simulation.
Open Research Institute granted Amateur Radio Club Call W6ORI
ORI now has its very own amateur radio club call. Membership in ORI’s amateur radio club is free. Just sign up for the Inner Circle Newsletter. Below is the poster announcing the debut of W6ORI. The announcement was made in RF Village at BSides San Diego, held at SDSU Montezuma Hall on 4 April 2026.

ORI Invited to Present Open Source Reference Design for IEEE P1954 UAV Communications Standard
Open Research Institute has been invited to present at the IEEE P1954 working group meeting on April 8th. Our topic: how to build an open source reference implementation for the emerging standard on self-organizing, spectrum-agile UAV communications.
What is IEEE P1954?
IEEE P1954 defines architecture and protocols that allow unmanned aerial vehicles to automatically form networks, dynamically access available spectrum, and coordinate communications without centralized infrastructure. Think of it as giving drones the ability to self-organize into mesh networks while intelligently sharing radio spectrum. These are critical capabilities for search and rescue, disaster response, infrastructure inspection, and beyond.
The standard is deliberately technology-agnostic. It specifies what UAV communication systems need to do, not how to build them. That’s where reference implementations come in.
Why Open Source Matters Here
Standards without working implementations remain academic exercises. An open source reference design serves multiple purposes
Experimentation platform: Researchers and developers can test ideas against a working baseline
Conformance validation: Implementers can verify their systems behave correctly
Lowered barriers: Smaller players can participate without building everything from scratch
Vendor neutrality: No single company controls the reference, aligning with the standard’s technology-agnostic philosophy
What ORI Brings to the Table
ORI’s existing work maps remarkably well onto P1954’s architecture. The standard envisions two distinct communication tiers:
Command & Control (C2): Safety-critical links requiring high reliability, low latency, and modest data rates
Payload: High-throughput channels for video and sensor data where best-effort delivery is acceptable
Our Opulent Voice protocol (MSK/CPFSK, constant envelope, narrowband) is designed for exactly the reliability-first requirements of C2 links. Our Neptune OFDM work addresses the high-throughput payload tier. Both have FPGA implementations in progress.
The standard also includes a SHALL-level requirement that UAVs “embed radio equipment such as software defined radios”. This is precisely our domain.
The Path Forward
We’re proposing to bring implementable chunks of P1954 into ORI repositories as open source FPGA and general-purpose processor designs. This isn’t about implementing the entire standard overnight. It’s about identifying the pieces most amenable to open source development and building momentum from there.
The April 16th meeting is our opportunity to discuss this approach with the working group and align our efforts with their priorities.
Get Involved
If you’re interested then this is an opportunity to contribute to an emerging international standard from the ground floor. Watch for updates on our mailing lists and repositories.
ORI Invited to Present Open Source Reference Design for IEEE P1954 UAV Communications Standard
Open Research Institute has been invited to present at the IEEE P1954 working group meeting on April 8th. Our topic: how to build an open source reference implementation for the emerging standard on self-organizing, spectrum-agile UAV communications.
What is IEEE P1954?
IEEE P1954 defines architecture and protocols that allow unmanned aerial vehicles to automatically form networks, dynamically access available spectrum, and coordinate communications without centralized infrastructure. Think of it as giving drones the ability to self-organize into mesh networks while intelligently sharing radio spectrum. These are critical capabilities for search and rescue, disaster response, infrastructure inspection, and beyond.
The standard is deliberately technology-agnostic. It specifies what UAV communication systems need to do, not how to build them. That’s where reference implementations come in.
Why Open Source Matters Here
Standards without working implementations remain academic exercises. An open source reference design serves multiple purposes
Experimentation platform: Researchers and developers can test ideas against a working baseline
Conformance validation: Implementers can verify their systems behave correctly
Lowered barriers: Smaller players can participate without building everything from scratch
Vendor neutrality: No single company controls the reference, aligning with the standard’s technology-agnostic philosophy
What ORI Brings to the Table
ORI’s existing work maps remarkably well onto P1954’s architecture. The standard envisions two distinct communication tiers:
Command & Control (C2): Safety-critical links requiring high reliability, low latency, and modest data rates
Payload: High-throughput channels for video and sensor data where best-effort delivery is acceptable
Our Opulent Voice protocol (MSK/CPFSK, constant envelope, narrowband) is designed for exactly the reliability-first requirements of C2 links. Our Neptune OFDM work addresses the high-throughput payload tier. Both have FPGA implementations in progress.
The standard also includes a SHALL-level requirement that UAVs “embed radio equipment such as software defined radios”. This is precisely our domain.
The Path Forward
We’re proposing to bring implementable chunks of P1954 into ORI repositories as open source FPGA and general-purpose processor designs. This isn’t about implementing the entire standard overnight. It’s about identifying the pieces most amenable to open source development and building momentum from there.
The April 16th meeting is our opportunity to discuss this approach with the working group and align our efforts with their priorities.
Get Involved
If you’re interested then this is an opportunity to contribute to an emerging international standard from the ground floor. Watch for updates on our mailing lists and repositories.
Open Research Institute granted Amateur Radio Club Call W6ORI
ORI now has its very own amateur radio club call. Membership in ORI’s amateur radio club is free. Just sign up for the Inner Circle Newsletter. Below is the poster announcing the debut of W6ORI. The announcement was made in RF Village at BSides San Diego, held at SDSU Montezuma Hall on 4 April 2026.
BSides San Diego 2026 RF Village Demonstrations
This is what development looks like!
Open Research Institute organized and executed the RF Village at BSides San Diego on 4 April 2026. This highly anticipated sold-out annual event has a focus on cybersecurity and DIY problem solving. Held at Montezuma Hall at San Diego State University, the one-day event had multiple speaking tracks, at least three Capture the Flag contests (CTFs), an electronic hackable badge, a variety of food and drink available throughout the day, extensive volunteer support, relevant and timely workshops, an After Hours party with more food and drink at Aztec Lanes bowling alley, and a vibrant Village Square that combined Villages and Vendors.
ORI served as the organizer for RF Village, bringing four staff members and multiple exhibits. We debuted our Lunar Lander CTF, announced the W6ORI amateur radio club, and gave away a large box of Amateur Satellite handbooks. We had RFBitBanger kits available for donation (5 were sold), hosted a live Meshcore node, and exhibited a real live FPGA development station with lab equipment for Opulent Voice. Our poster session included Authentication and Authorization and the technical side of RFBitBanger. Thank you to BSides San Diego for the excellent support, with rotating village volunteer staffers, volunteer green room, excellent communications before during and after the event, and genuine care for positive participant experience. Organizations like this make demonstrating open source digital radio work a real joy instead of a daunting chore.
Demonstrations give you deadlines, documentations, and get things “done”. The BSides Opulent Voice demonstration revealed some immediate problems with the 24 dB transmitter fix. The signal was clearly being transmitted at sufficient power, but the symbol and frame lock were not happening. We were seeing “garbage” frames where we were expecting to see actual live data.
Since the over-the-air voice call had worked so well just a few days prior, what was going on? The demonstration was still very successful, as plenty could be shown to the steady stream of people at the RF Village. As the day progressed, more information was gathered. It was very clear we’d have to go back to the lab to figure out how a badly needed transmitter fix had broken the receiver. Why was it working over the air, and not in RF loopback on the bench? First, we went back to the VHDL-only test bench. This sends 10 frames into the transmitter, routes the transmit I and Q streams right back to the receiver, and then demodulates, decodes, and displays the frames. The data in should match the data out. And, frames were coming out, but they were completely scrambled! Something had gone wrong in the RF loopback.
The difference between simulations and real life is usually a lot, and Opulent Voice is no different. A real hardware RF loopback has the radio chip in the loop. The VHDL test bench has only the FPGA contents. We don’t have analog to digital converters (ADCs), digital to analog converters (DACs), or anything else that is in the radio chip. Since the transmitter fix had a lot to do with how the transmitter DAC dealt with the data, it seemed reasonable to assume that the transmitter fix had upset the receiver.
The missing gain was in the transmitter, but the fix applied some math changes to both the transmiter and the receiver, and investigating this took up part of the next day back in the lab. WIth two minor changes, the test bench started working flawlessly again. A new version of the firmware was created, and… it didn’t work in hardware at all! Symbol lock and frame lock were totally non-functional. The plot had certainly thickened.
This is one of the many reasons why demonstrations are so valuable. We find things that we might not go looking for, and it forces us to regularly show things working end-to-end. Work continues this week in the lab to separate the transmitter fix from inadvetently affecting the receiver, and bring us back to working perfectly over the air as well as in simulation.
Lunar Descent, the BSides San Diego 2026 RF Village Capture the Flag (CTF) from ORI
A capture-the-flag challenge based on a real signal processing problem in a radar altimeter!
https://github.com/OpenResearchInstitute/lunar-descent-ctf
Indian Space Research Organization (ISRO) designed a Ka band radar altimeter (KaRA) that guided Chandrayaan-3 to a soft lunar landing on 23 August 2023. The Radar Altimeter Processor (RAP) computes altitude and velocity from FMCW chirp signals, running on a single Xilinx Virtex-5 FPGA. This CTF uses a Python model of that system, faithful to the published paper in the Aeronautics and Electronic Systems Journal, where the altimeter feeds a landing autopilot. In our CTF, the altimeter works perfectly. The autopilot keeps crashing. Why? (solution in next newsletter!)
What did the participants see? A python script that could be installed on their computer and then run.
pip install numpy matplotlib
python lunar_descent_ctf.py --help # See all options
python lunar_descent_ctf.py # Run the mission, watch it crash
python lunar_descent_ctf.py --modes # See the sweep mode table
python lunar_descent_ctf.py --test -p all # Test all three profiles
python lunar_descent_ctf.py --score # Score your fix and earn flagsRules
Edit ONLY the `MeasurementQualifier` class (clearly marked in the source)
Don’t change the RAP, signal generation, autopilot, or scoring
The qualifier decides what the autopilot sees — fix it there
Submit flags at the RF Village table
Three Flags
None of the flags are “free”. The buggy code scores 0 / 1000 points out of the box.
| Flag | Points | Challenge |
| RECON | 100 | Explain the bug to RF Village staff. No hash on screen. |
| FIRST LIGHT | 500 | Land all three profiles without crashing. |
| NO GAPS | 400 | Zero qualifier rejections on all three profiles. |
Total: 1000 points
The Scenario
The radar altimeter was tested on helicopters and aircraft at altitudes above 50 meters. It worked flawlessly. Field test performance met all mission specifications.
The altimeter is now integrated with a landing autopilot that uses both altitude and velocity measurements for thrust control during final approach. In simulation, the autopilot crashes the lander every time below 15 meters altitude. The altitude readings are fine. Sub-meter accuracy all the way to touchdown. Something else is killing the lander.
You need to find out what’s going wrong and fix the measurement qualification logic so the autopilot can land safely.
Difficulty Curve
0 points: Running the code unmodified. The default run shows OK status all the way down until the final approach, then CRASH.
100 points: Explaining the problem to staff.
600 points: Fixing the `MeasurementQualifier` so it can land.
1000 points: Eliminating all qualifier rejections.
Validating Flag 1 (RECON)
No hash is printed on screen for Flag 1. Staff issue the flag manually.
Timing
The CTF ran all day alongside the workshop modules and talks. It’s self-paced and doesn’t require staff attention except for Flag 1 validation and prize distribution.
Test Profiles
| Profile | Character | What It Tests |
| standard | Chandrayaan-3-like smooth descent, 10 km → 3 m, with altitude excursion at 20 m (thruster anomaly or drifting over crater) | Landing |
| aggressive | Fast exponential braking, 10 km → 3 m in 400 s | Rapid mode transitions at hight altitude + Landing |
| stepwise | Hover at guard band boundaries (9851/4795/2334/553/131/31/5 m), drop between them | Mode transitions + Low Hover |
The Physics
The RAP uses FMCW radar. Up-chirp and down-chirp signals produce beat frequencies:
f_up = fb − fd (up-chirp)
f_dn = fb + fd (down-chirp)Altitude comes from the sum: R = M × (f_up_index + f_dn_index).
Velocity comes from the difference: fd = (f_dn_index − f_up_index) × freq_res / 2.
The FFT is always 8192 points, but the number of real signal samples depends on the sweep time:
Mode 12 (high altitude): 8192 samples, full FFT
Mode 0 (3 m altitude): 14 samples, 99.8% zero-padding
Connection to Real Engineering
The problem is pedagogically framed but the pattern is real. Sensor qualification, knowing when to trust a measurement and when to reject it, is important.
Radar and sonar tracking systems (Doppler reliability vs integration time)
GPS/INS integration (knowing when satellite geometry is too poor to trust)
Medical imaging (SNR-dependent confidence in measurements)
Autonomous vehicle sensor fusion (camera vs lidar vs radar confidence)
The paper mentions “three sample qualification logics to generate the final altitude” without detailing them. What are those logics? Will some of those qualification logics help solve this CTF?
Source
Based on: Sharma et al., “FPGA Implementation of a Hardware-Optimized Autonomous Real-Time Radar Altimeter Processor for Interplanetary Landing Missions,” IEEE A&E Systems Magazine, Vol. 41, No. 1, January 2026. DOI: 10.1109/MAES.2025.3595090